




USBSSC32 舵机控制板优点:
1、对于多舵机设备而言,确定每一个动作的各舵机转角参数实在是件不容易的事,有了配套的上位机舵机控制软件,通过“示教”的方法,调试、记录、下载一气呵成,使这一过程变得轻松方便;
2、舵机控制板上有一块存储器芯片,可以存储多组动作序列,这样上位计算机,发几条字符串命令,就可以让多舵机机器人做出复杂的动作套路,当然也可以通过字符串命令控制每个舵机的每个动作细节;
3、舵机控制板可以安装蓝牙模块或者APC220无线数传,这样可以让舵机控制板控制的机器人摆脱有线的束缚;
4、32路舵机控制板实际上可以看成一个输入输出接口板,它自己并没有程序思考能力,大家可能认为有点遗憾,但是把大脑交给远端的计算能力更强的PC机,不是不用担心Arduino UNO控制器可怜的CPU能力无以应付智能机器人“繁琐”的计算工作吗?或许您还可以利用PC机做些可视化的操作,所以这样的设计好像还蛮合理的;
5、舵机控制板不仅可以同时控制多达32路的伺服电机,可贵的是它还具有4个数字和模拟输入接口,可以接5V电压的传感器,这样就能实现带反馈的闭环控制,让多舵机设备,比如机器蜘蛛,可以根据周边环境变化,做出相应的动作反映。
32路舵机控制器与Arduino比较:
熟悉Arduino的人都知道Arduino有一个缺点就是I/O口较少,要想做个智能机器人,一两个舵机再加几个传感器是不行的,若想用Arduino控制十几个甚至二十几个舵机来做各种机器人的话,硬件资源就显得有些力不从心了,我发现32路舵机控制器很好的解决了这个问题,研究明白它与Arduino的通信,控制多个舵机也就变得简单多了。
首先来介绍一下这个32路舵机控制器,下面是该控制器的功能图解。
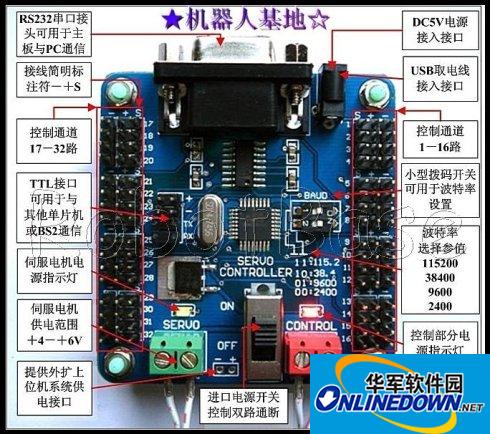
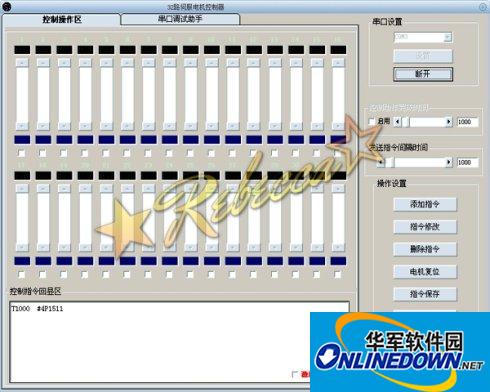
这个控制器使用起来还是蛮简单的,接上电源(这里要注意,伺服电机供电,绿端子要接入+4V到+6V电压,控制部分,红端子供电要接入+7V到+12V电压),红绿指示灯就会亮起,再插好舵机,若单独使用控制器的话,可以用PC机做上位机通过自带的调试软件控制舵机转动角度以及速度。
这是我看到的上位机界面。
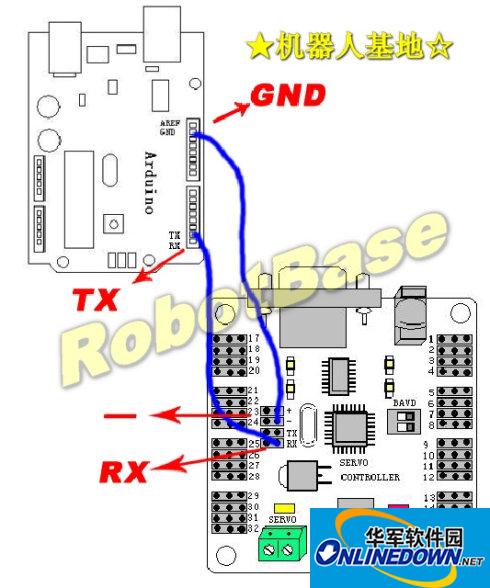
它与Arduino配合连接也很简单,接线如下图,只要将Arduino的TX与控制器的RX连接,再共地(GND)就OK了。
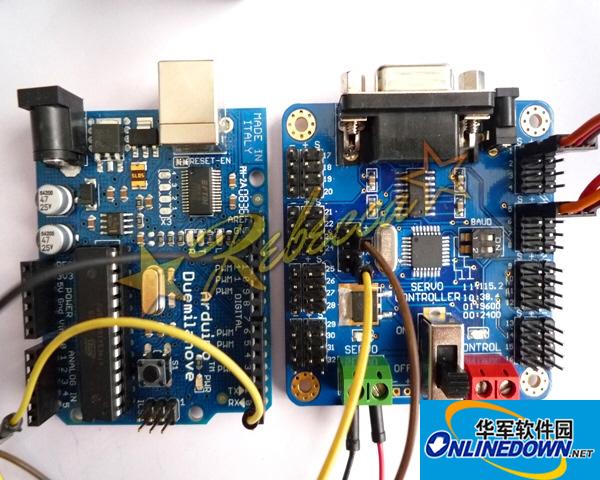
我的实物连线图



























有用
有用
有用